Curiosity mira hacia el este hacia la duna de arena "Dingo Gap" dentro del Cráter Gale
Después de cruzar la duna de 3 pies (1 metro) de altura en Sol 539, febrero. Crédito: NASA / JPL / Ken Kremer- kenkremer.com/Marco Di Lorenzo
Vea los mosaicos de Dune and Wheel a continuación: historia actualizada [/ caption]
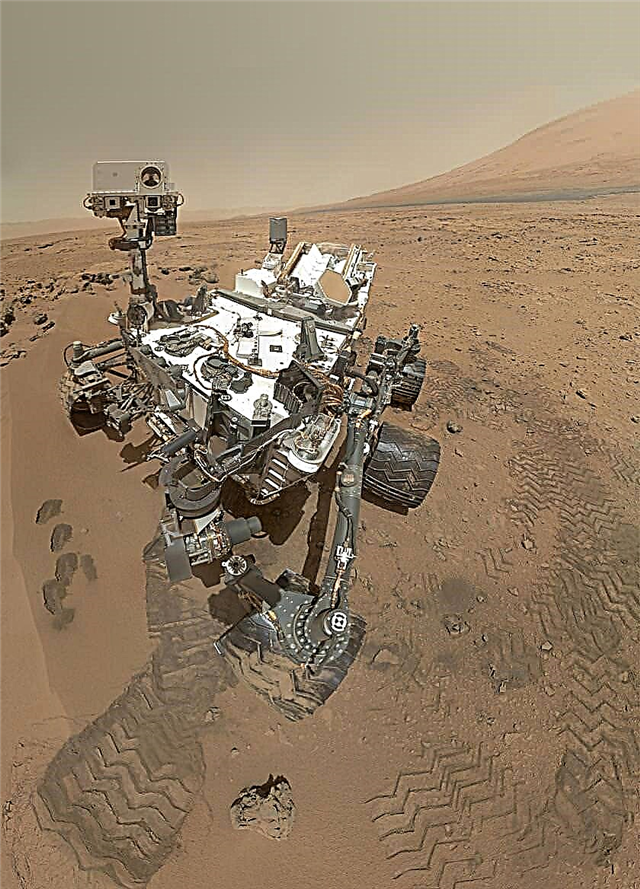
El equipo que dirigió el viaje épico del rover Curiosity de la NASA a través del piso del cráter Gale ha adoptado nuevas estrategias de manejo y un nuevo camino hacia adelante en respuesta al daño inesperado de la rueda causado por conducir sobre campos de rocas ásperas del planeta rojo en los últimos meses.
Esta semana, los ingenieros ordenaron a Curiosity, un buggy de dunas, que condujera hacia atrás durante una larga distancia sobre la superficie marciana por primera vez desde el aterrizaje.
El vehículo del tamaño de un SUV aparentemente pasó la prueba de viabilidad de conducción inversa con gran éxito y ahora está en camino hacia el emocionante viaje por delante con el objetivo de las capas sedimentarias en la base del imponente Monte Sharp, el destino principal de la misión, que alcanza 3.4 millas (5.5 km) hacia el cielo marciano y posee minerales con agua alterada.
"Queríamos conducir hacia atrás en nuestro juego de herramientas validado porque habrá partes de nuestra ruta que serán más difíciles", dijo en un comunicado Jim Erickson, Gerente del Proyecto Curiosity, del Laboratorio de Propulsión a Chorro de la NASA, en Pasadena, California.
El martes 18 de febrero, Curiosity no solo condujo en reversa, sino que la distancia cubierta de 329 pies (100.3 metros) marcó su avance más rápido de un día en más de tres meses.
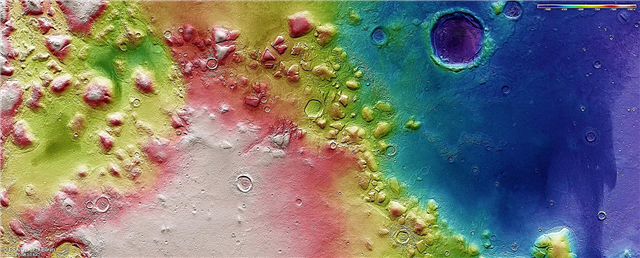
Y ahora también está deambulando por el tan buscado terreno marciano más liso, como se esperaba, cuando el equipo decidió alterar la ruta transversal en base a observaciones de imágenes de alta resolución recolectadas por la cámara telescópica en el Orbitador de Reconocimiento de Marte (MRO) de la NASA que circula por encima.
El objetivo es minimizar el desgaste de las ruedas de 20 pulgadas de diámetro.

Los ingenieros se vieron obligados a idear nuevas técnicas de conducción y considerar una nueva ruta hacia adelante después de que las ruedas de aluminio acumularon pinchazos y rasgaduras significativas durante los últimos meses de conducción sobre campos cubiertos de rocas marcianas afiladas.
"Hemos cambiado nuestro enfoque para mirar el panorama general para llegar a las laderas del Monte Sharp, evaluando diferentes rutas potenciales y diferentes puntos de entrada al área de destino", dijo Erickson.
“Ninguna ruta será perfecta; tenemos que descubrir el mejor de los imperfectos ".
Pero para alcanzar el terreno liso y los objetivos ricos en ciencia ubicados en el camino por delante, el rover de seis ruedas primero tuvo que pasar por una puerta de entrada conocida como la duna de arena "Dingo Gap".

"Moonlight Valley" es el nombre del nuevo lugar impresionante más allá de Dingo, dijo el investigador principal de Curiosity, John Grotzinger, de Caltech, a la revista Space.
La curiosidad cruzó con facilidad la duna de arena de 3 pies (1 metro) de altura Dingo Gap el 9 de febrero y avanzó hacia objetivos en el "Valle de la Luz de la Luna" y la región más allá.
"Moonlight Valley tiene muchas venas que lo atraviesan", me dijo Grotzinger.
"Estamos viendo la roca madre recesiva".

Desde que pasó por la puerta de entrada de Dingo Gap, Curiosity ha recorrido otros 937 pies (285.5 metros) para una odometría total de la misión de 3.24 millas (5.21 kilómetros) desde el mordisco del clavo el 6 de agosto de 2012.
“Después de superar la duna, comenzamos a conducir en un terreno que se parecía a lo que esperábamos en función de los datos orbitales. Hay menos rocas afiladas, muchas de ellas están sueltas, y en la mayoría de los lugares hay un poco de arena que amortigua el vehículo ", dijo Erickson.

El objetivo a corto plazo de Curiosity es alcanzar su próximo punto de referencia científico, llamado Kimberly (anteriormente llamado KMS-9) que se encuentra a unos dos tercios de una milla (aproximadamente 1.1 kilómetros) por delante.
Kimberly es de interés para el equipo científico porque se encuentra en la intersección de diferentes capas de roca.
El robot de 1 tonelada puede ser dirigido a perforar en otra roca en Kimberly.
Si se aprueba, Kimberly sería su primera desde la operación de perforación desde que perforó el objetivo de roca Cumberland la primavera pasada y desde que salió de la región de Yellowknife Bay en julio de 2013, donde descubrió una zona habitable.

Hasta la fecha, el odómetro de Curiosity se encuentra a 5.2 kilómetros y ha tomado más de 118,000 imágenes. El robot tiene unos 5 km más para llegar a las estribaciones del monte Sharp.
Mientras tanto, el rover Opportunity hermano de la NASA fue fotografiado desde la órbita por MRO mientras exploraba afloramientos de minerales de arcilla en la cumbre de Solander Point en el lado opuesto de Marte al comienzo de su segunda década investigando los misterios del planeta rojo.
Y un par de nuevos orbitadores se dirigen al Planeta Rojo para fortalecer la flota de invasión de la Tierra: el MAVEN de la NASA y la MOM de la India.
Estén atentos aquí para la Curiosidad, Oportunidad, Chang’e-3, SpaceX, Ciencias Orbitales, LADEE, MAVEN, MOM, Marte, Marte y más noticias de vuelos espaciales planetarios y humanos.